
Loose Fruit Collector Concept 3 refers to a mechanized device for gathering loose palm oil fruits, typically utilizing a cyclonic vacuum system to enhance efficiency and reduce manual labor. This concept improves fruit cleanliness and collection speed through integrated suction, debris separation, and elevated discharge mechanisms.
This model represents a mechanical loose fruit collector that uses a sweeping mechanism and manual operation for efficient collection of fruits from the ground.
Key Features
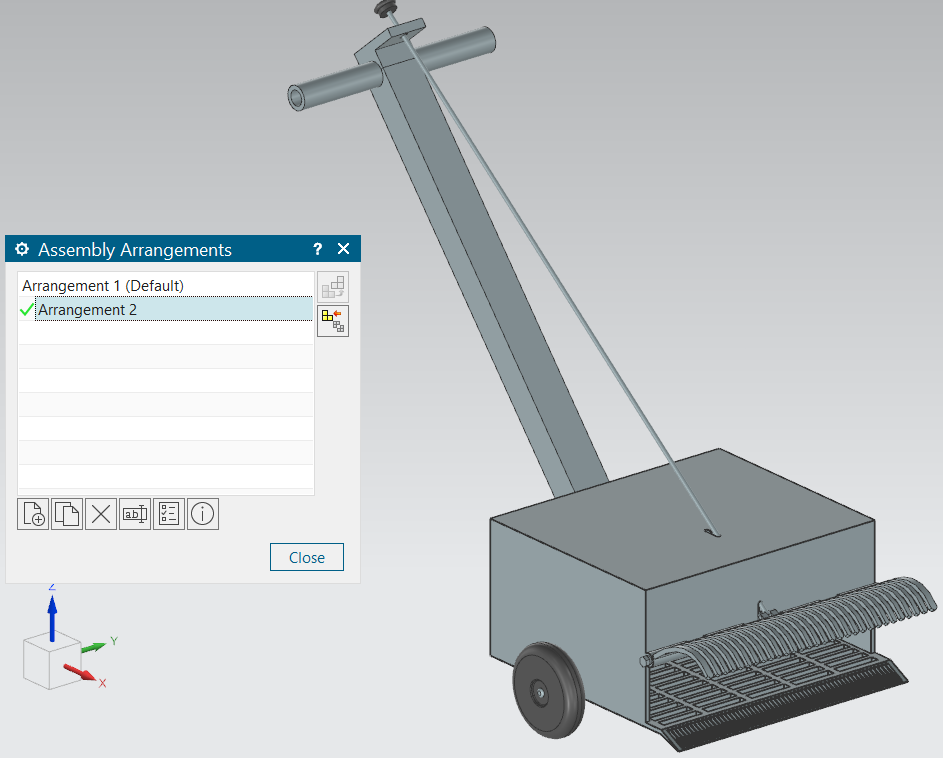
- The device features a long, angled handle for ergonomic manual operation, allowing the user to push or pull the collector comfortably across an area.
- The front section incorporates a rotating or fixed comb-like rake that sweeps loose fruits towards the collection box as the device moves forward.
- The main body is a rectangular bin mounted on two wheels for easy maneuverability, collecting and storing the swept-up fruits.
- The support rod connecting the handle to the main body adds stability during operation, preventing excessive tilting.
Working Principle
- As the model is pushed along the ground, the comb/rake at the front lifts loose fruits and channels them onto the built-in grid beneath.
- Fruits fall through the comb and grid into the collection box, while leaves and debris may be filtered out, depending on the grid spacing.
- The manual rake design enables quick collection of scattered fruits while minimizing physical strain, suitable for small-scale or experimental field operations.
Possible Applications and Improvements
- Ideal for small plantations, orchards, or trial plots where motorized vacuum systems are impractical or cost-prohibitive.
- Modular combs or grid spacing can be customized for different fruit types or ground conditions.
- An upgraded version could incorporate a motor-driven rake or an automated unloading system for increased capacity.
This mechanical concept offers a practical, low-maintenance alternative to more advanced vacuum collectors, focusing on simplicity and ease of use for manual harvesting scenarios.